Концепция оптической навигационной связной системы для Луны
#Космическая философия-Космическое право-Космическая деятельность: триединство космического прорыва ч
Аннотация
Рассматривается концепция создания оптической системы глобального позиционирования на Луне метровой точности, предназначенная для обслуживания ограниченного числа абонентов. Показано, что оптимальным решением задачи будет непрерывный контроль положений световых лазерных маяков на поверхности Луны с борта искусственного спутника Луны, оснащённого бортовой телекамерой, а также с борта космического аппарата, помещённого в точки Лагранжа L1 (и L2) системы Земля – Луна и оснащенного высокоразрешающими оптоэлектронными приборами.
Ключевые слова: глобальное позиционирование; навигация на Луне; световой лазерный маяк; оптический интерферометр.
Abstract
The concept of creating an optical global positioning system on the moon meter accuracy, designed to serve a limited number of subscribers. It was shown that the optimal solution to the problem would be continuous monitoring of the positions of light laser beacons on the lunar surface from the board of the artificial moon satellite equipped with an onboard television camera, as well as from the spacecraft placed at the Lagrange points L1 (and L2) of the Earth - Moon system and equipped with high-resolution optoelectronic devices.
Key words: global positioning; navigation on the moon; lighthouse laser light; an optical interferometer.
Введение
Проведение исследований на поверхности Луны должно опираться на высокоточную систему позиционирования находящихся на Луне объектов, особенно луноходов и пилотируемых аппаратов. Системы глобального позиционирования на Земле успешно функционируют уже много лет, позволяя пользователям в любой момент определять свое положение с точностью лучше 5 метров. Вполне естественным кажется, желание повторить отработанную систему глобального позиционирования и на Луне. Однако, это невозможно по нескольким причинам.
Во-первых, реализованные системы глобального позиционирования (GPS, ГЛОНАСС, Galileo) опираются на работу многочисленной группировки спутников, чтобы в любой момент времени у любого наземного пользователя системы была возможность уверенно принимать сигналы, как минимум, от четырёх навигационных спутников. По принимаемому со спутника сигналу наземный приёмник вычисляет дальность до каждого спутника, и, по известному пространственному положению спутников, определяет своё пространственное положение [1].
В том случае, когда система глобального позиционирования рассчитана на массового потребителя, её существование экономически оправдано стоимостью измерения координат одного приёмника, которая существенно ниже стоимости (при равной точности) определения тех же координат другими способами, например, астрономическими. На Луне потенциальное число позиционируемых объектов в ближайшее десятилетие не превысит несколько единиц; в этом случае стоимость проведения координатных измерений одного объекта возрастает до недопустимой величины.
Во-вторых, наземные системы глобального позиционирования не могут существовать без наземной координатной поддержки. Орбита каждого навигационного спутника должна быть точно известна, а всякие изменения её параметров – отслежены. На Земле существует несколько сотен станций наземной поддержки систем глобального позиционирования, тогда как на Луне их нет, и в обозримом времени, не предвидится.
В-третьих, космическая техника рассчитана на сравнительно недолгий срок безотказной работы, – на 7…10 лет. Это значит, что группировка спутников системы глобального позиционирования должна постоянно обновляться (и резервироваться). Получается парадоксальное положение, когда для позиционирования нескольких аппаратов на Луне требуется многочисленная группировка искусственных спутников Луны навигационного назначения.
В работе [2] детально анализируется необходимое количество космических аппаратов для создания радиотехнической лунной навигационной системы и показано, что для этого необходимо до 18 лунных навигационных спутников.
Поэтому актуально разработать лунную навигационную систему на новых принципах. Мы считаем, что такую систему можно создать на основе средств оптико-электронных космических систем наблюдения и световых лазерных маяков.
Прежде всего, определимся с необходимой точностью лунной навигационной системы. Структурирование таких объектов показывает, что вершиной планов по освоению Луны является строительство лунных баз, в которых можно выделить три класса объектов. Для которых необходимы определенные точности, что отражено в таблице 1.
таблица 1. Необходимые точности для лунной навигации

Для решения задачи создания лунной навигационной системы необходимо решить следующие проблемы:
- создание высокоточной селенодезической системы координат, путем создания опорных световых лазерных маяков и систем наблюдения с космических аппаратов;
- использование полярного орбитального лунного аппарата с оптико-электронной системой наблюдения, позволяющую наблюдать как объекты навигации, так и опорные лазерные маяки. Такая система позволяет увидеть все объекты с интервалом в две недели;
- заключительным этапом развития такой системы является размещение космических аппаратов с оптическими приборами в точках Лагранжа L1 и L2, что позволит обеспечить глобальную координатно-временную привязку объектов на Луне.
Система оптического позиционирования на Луне
Основой такой системы может служить разрабатываемые оптико-электронные средства в рамках выполняемых лунных проектов Федеральной Космической программы; в НПОЛ ведётся разработка служебных систем позиционного контроля лунных посадочных станций (ЛПС) с помощью световых лазерных маяков [3]. Первоначально задачей служебной системы световых лазерных маяков лунной миссии было установление точного места посадки ЛПС в запланированной области и измерение лунных координат ЛПС независимыми методами – по наблюдениям маяка с борта искусственных спутников луны (ИСЛ) и по наземным телескопическим наблюдениям. Световые лазерные маяки на основе лазерных диодов энергетически высокоэффективны и имеют очень большой ресурс безотказной работы. Оценочные расчеты мощности таких маяков показали, что их уровень 1-3 Вт [4].
Многократные наблюдения этих световых лазерных маяков телевизионным комплексом с борта ИСЛ позволяют методами геодезического уравнивания результатов измерений сформировать (установить) систему селенографических координат, привязанную к этим маякам как к точечным реперам. Только для этого необходимо иметь на Луне несколько таких реперов. Световые лазерные маяки вблизи полюса Луны позволят уточнить положение оси вращения Луны и измерять широту места с высокой точностью. Нужны такие реперы и вблизи лунного экватора, – с их помощью можно будет с высокой точностью измерять долготы пунктов относительно этих реперов.
Орбита спутника задаётся шестью независимыми параметрами; пять из них определяет пространственное положение плоскости орбиты, проходящей через центр масс Луны, размер, эксцентриситет и ориентацию этой орбиты. Шестой параметр задаёт положение ИСЛ на орбите как функцию времени.
Параметры орбиты спутника могут быть вычислены на основе бортовых угловых измерений. Каждый маяк имеет свои индивидуальные и неизменные координаты – широту, долготу и высоту над центром масс Луны. Каждая звезда имеет две фиксированные координаты – прямое восхождение и склонение. Легко подсчитать, что каждый измеренный с борта ИСЛ угол является функцией 11 независимых переменных (6 параметров орбиты, 3 координаты маяка и 2 координаты звезды). Из них всегда точно известны момент времени и 2 координаты звезды. Можно принять в качестве первого приближения, что орбита ИСЛ постоянна, то есть каждый измеряемый угол зависит только от одного изменяющегося параметра – момента времени, – а все остальные являются постоянными. В этом случае можно провести 10 независимых измерений для каждого маяка, и составить систему из 10 линейно независимых уравнений с 10 неизвестными. Математически такая система решается однозначно. Но длительность работы световых лазерных маяков и ИСЛ позволяет провести сотни таких измерений! В этом случае избыточность измерений может быть использована для уточнения значений тех «постоянных», которые могут медленно изменяться (например, параметры орбиты ИСЛ). Математическая сторона этого подхода уже проработана [6].
Здесь очень важно отметить, что с помощью световых лазерных маяков устанавливается не только система селенографических координат, но и её связь с системой небесно-механических координат, в которых определяются параметры движения ИСЛ. Получение этой связи позволит обеспечивать выведение КА в точку с заданными селенографическими координатами (и при необходимости осуществлять посадку в неё) с точностью порядка нескольких метров.
Развиваемый в настоящей работе подход к установлению селеноцентрических координат на основе световых лазерных маяков может быть использован для глобального позиционирования объектов на Луне. С одной, но существенно, оговоркой: метод может успешно применяться в тех случаях, когда оперативность позиционирования не является обязательной. Предложенный и реализуемый в миссиях «Луна-25» и «Луна-26» метод использует только один ИСЛ, который не может наблюдать какой-то объект на каждом витке [7]. Вместо того чтобы предлагать создание группировки спутников Луны, с целью обеспечить непрерывное наблюдение за выделенным объектом, мы предлагаем использовать специфические свойства Луны, а именно, её постоянную ориентацию видимым полушарием в сторону Земли и наличием либрационных точек L1 и L2 системы «Земля – Луна». Точка либрации L1 расположена на линии, соединяющей центры масс Земли и Луны на расстоянии ~61500 км от Луны. Если в эту точку поместить КА с комплексом оптико-электронных приборов наблюдения, то с него можно будет постоянно наблюдать всю видимую сторону Луны, как показано на рисунке 1. Точно так же из точки L2 можно будет непрерывно наблюдать всю обратную сторону Луны.
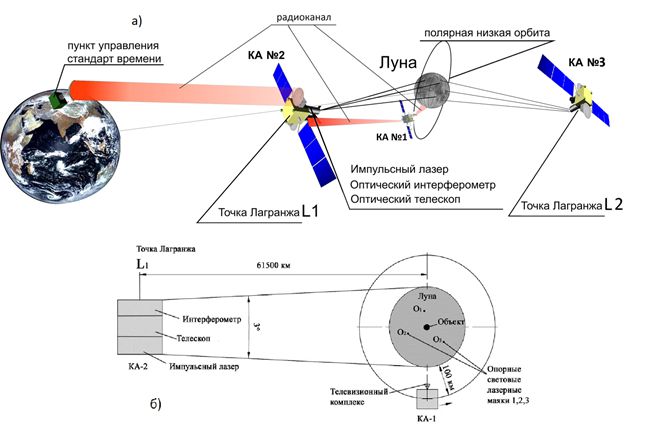
рисунок 1. Схема построения глобальной оптической лунной навигационной системы:
а) – схема размещения космических аппаратов;
б) – схема наблюдения.
Из точек либрации диск Луны будет занимать угол 3 градуса, и при угловом разрешении 1" будут видны детали поверхности Луны размером около 200 метров.
Полярный аппарат будет использоваться как ретранслятор передачи информации с КА в точке L2.
Задачей КА в точках либрации будет непрерывное измерение относительных положений расположенных на Луне световых лазерных маяков, – как неподвижных, так и перемещающихся (например, установленных на луноходах). Если вблизи светового лазерного маяка с измеряемым положением имеются неподвижные «реперные» маяки с известными координатами, то из видимого расположения измеряемого маяка в окружении реперных легко вычислить его селеноцентрические координаты.
Для решения этой задачи необходимо обеспечить такой режим работы реперных световых лазерных маяков, чтобы их излучение на КА КА было независимо от их положения на Луне. Для работы с ИСЛ маяк на ПЛС «Луна-25» и «Луна-26» освещает только околозенитную область, в которую не могут попасть точки либрации, поскольку маяк находится в стороне от центра диска Луны. Необходимо, чтобы свет маяка освещал КА в точке либрации. Для непрерывного слежения за объектом на Луне потребуется применение оптических лазерных излучателей, направленных в сторону точки либрации. На видимой стороне Луны это направление совпадает с направлением на Землю, поэтому излучение второго лазерного маяка, направленного на Землю, может быть использовано для регистрации его света из точки либрации и измерения селенографических координат объектов на Луне[11].
Представленная глобальная навигационная оптическая лунная система является сложным управляемым информационным комплексом. Схема такого комплекса представлена на рис.2
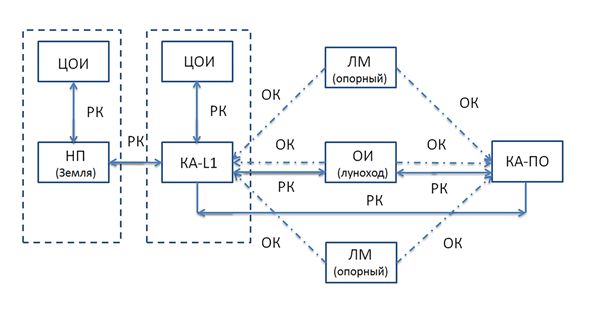
рисунок 2. Схема управление лунной оптической навигационной системой: НП – наземный пункт, КА-L1 – аппарат в точке Лагранжа, ЛМ – лазерный маяк, ОИ – объект исследования, КА-ПО – полярный орбитальный аппарат, ЦОИ – центр обработки информации, РК – радиоканал, ОК – оптический канал.
Данный информационный комплекс является сложной системой взаимодействия оптических и радиотехнических средств.
Последовательность управления ЛНСС заключается в следующем:
1. Команда по включению реперных точек (световой лазерный маяк)
2. Команда наведения систем наблюдения на объект исследования
3. Команда передачи видеоинформации данных с реперов и объекта исследования на полярный КА и на КА в точке Лагранжа
4. Команда передачи данных на наземный пункт
5. Команда по передаче координат объекта на объект исследования.
Ожидаемая точность определения координат световых маяков на поверхности Луны:
1. После проведения миссий «Луна-25» и «Луна-26»:
Точность измерения координат светового маяка – не хуже 10 метров. Точность привязки каркаса селеноцентрической системы координат, установленного в точках с лазерным маяке и с уголковыми лазерными отражателями, составит 10 метров. Точность позиционирования объектов вблизи узлов каркаса селенографических координат – 10 метров, на удалении 100 км – 30 метров. Частота позиционных измерений объектов вблизи лунного экватора – один раз в две недели.
2. При использовании оптического телескопа в точке либрации:
При расположении реперных маяков не далее 100 км от точки измерений, позиционирование объектов на лунной поверхности можно вести непрерывно, с точностью порядка 30 метров, до 1000 измерений в час. Использование бортового импульсного лазера позволит в совокупности с ретрорефлекторами лазерных станций увеличить точность и надёжность системы лунной навигационной системы[12-15].
При использовании оптического интерферометра типа ЛИДА [8,9] в точке либрации: непрерывно, с субсантиметровой точностью, до 20 измерений в час.
Расширение каркаса селенографической системы для повышения точности позиционирования на Луне может быть обеспечено размещением световых лазерных маяков непосредственно в районе проводимых исследований путём доставки их на поверхность Луны сбрасываемыми пенетраторами [16].
Заключение: Последовательность создания глобальной системы позиционирования для Луны
1.Создание каркаса селенодезической системы координат с привязкой осей к точечным реперам на Луне (в программы «Луна-Глоб» и «Луна-Ресурс»).
2.Последующие добавление световых лазерныхМаяков на исследуемых территориях Луны (более 3-5 шт, в зависимости от места проведения работ).
3.Размещение в точке Лагранжа КА с оптическими инструментами для постоянного наблюдения за аппаратами на лунной поверхности.
4.Периодический контроль каркаса селеноцентрической системы координат по его текущему состоянию на работающих световых маяках (во время работыполярных спутников Луны). Положение контрольных маяков будет координатно привязано к лунным снимкам LRO, чтобы была получена топографическая карта Луны.
Библиографический список
1. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. 4-е изд., перераб., доп. М.: Радиотехника, 2010. 800 с.
2. Гордиенко Е.С., Ивашкин В.В., Симонов А.В. Анализ устойчивости орбит искусственных спутников Луны и выбор конфигурации лунной навигационной спутниковой системы // Вестник НПО им. С.А. Лавочкина. 2016. № 4. С. 40-54.
3. Горячев А.В., Смотряев С.А., Вернигора Л.В., Сысоев В.К. Особенности конструкции световых маяков для лунных посадочных станций // Вестник НПО им. С.А. Лавочкина. 2013. № 2. С. 31-34.
4. Вернигора Л. В., Пичхадзе К. М., Сысоев В. К. Aнaлиз пaрaметров излучaтеля оптического мaякa для системы нaвигaции космических aппaрaтов // Труды МAИ. 2017. № 95. URL: http://trudymai.ru/published.php?ID=84553
5. Казмерчук П.В., Мартынов М.Б., Москатиньев И.В., Сысоев В.К. и др. Космический аппарат «Луна-25» – основа новых исследований Луны // Вестник НПО им. С.А. Лавочкина. 2016. № 4. С. 9-19.
6. Ширенин А.М., Мазурова Е.М., Багров А.В. Построение высокоточной селенодезической системы координат на физической поверхности Луны с помощью светодиодных маяков, расположенных на ее поверхности // Космические исследования. 2016. Т. 54, № 6. С. 493-498.
7. Dan Cho Space Tracker. The earliest satellite watchers’ ideas led to GPS // Technology Review (2004-12-1).
8. ЗахаровА.И., МироновА.В., ПрохоровМ.Е., БирюковА.В. и др. Космический эксперимент «ЛИРА-Б»: Цели и принципы реализации // Астрономический журнал. 2013. Т. 90, № 3. С. 223-241.
9. Боярчук А.А., Багров А.В., Барабанов С.И., Сысоев В.К. и др. Космический астрометрический эксперимент ОЗИРИС / Под ред. Л.В. Рыхловой и К.В. Куимова. Фрязино: Век-2, 2005. 350 с.
10. Слесаренок С.В., Шепеть И.П., Рубинов В.И., Титов Ю.П. Автокомпенсация погрешностей навигационных датчиков бесплатформенной инерциальной навигационной системы // Труды МАИ, 2016, № 86: http://www.mai.ru/science/trudy/published.php?ID=66381.
11.Mark A. Wieczorek, Gregory A. Neumann, Francis Nimmo et al., The Crust of the Moon as Seen by GRAIL // Science08 Feb 2013: Vol. 339, Issue 6120, pp. 671-675
12. Program Acquisition Costs by Weapon System. Department of Defense Budget for Fiscal Year 1993. — January 29, 1992. — P. 116 — 124 p.
13.Statement of Lt. Col. Leonard R. Kruczynski, USAF, GPS Yuma Test Force. / Hearings on Military Posture and H.R. 3689, April 11, 1975. — Washington, D.C.: U.S. Government Printing Office, 1975. — P. 5204, 5213, 5214 — 5324 p.
14.Statement of Col. Brad Parkinson, USAF, GPS Program Manager. / Hearings on Military Posture and H.R. 3689, April 11, 1975. — Washington, D.C.: U.S. Government Printing Office, 1975. — P. 5212 — 5324 p.
15. A Standardized Lunar Coordinate System for the Lunar Reconnaissance Orbiter LRO Project White Paper. Version 4, 2008, May 14. // Goddard Space Flight Center, Greenbelt, Maryland, 2008.
16. Родченко В. В., Садретдинова Э. Р., Заговорчев В. А., Луговцов И. В. Влияние особенностей функционирования двигателя на технические характеристики лунного пенетратора // Труды МAИ. 2012. № 59. URL: http://trudymai.ru/published.php?ID=35254